

气动肌肉助力背心以及柔性驱动器研究情况——SMC南京(气动)技术中心-李小宁团队
李小宁,博士,教授 博导,SMC南京(气动)技术中心主任,主要从事气动控制技术、机电控制技术等领域的研究工作,中国自动化学会制造技术专业委员会副主任,中国机械工程学会流体传动与控制分会气动技术专业委员会委员、江苏省机械工程学会常务理事,南京市机械工程学会副理事长,江苏省制造业信息化咨询专家组专家,省“333 工程”,“青蓝工程”培养对象。科研成果获省部级科技进步二等奖1 项,三等奖2 项。在国内外著名杂志上发表论文百余篇,其中被SCI、EI 收录30 余篇,发明专利10 余项,并有专著《液压噪声控制》、教材《自动化控制系统》出版。
一、背景资料
脊柱是人体上身的支柱,位于背部正中,由脊柱骨和椎间盘组成。上身的重量及提承的重物重量都会作用在脊柱上,并传递到下肢,而腰椎间盘所受到的力最大。患有腰椎间盘突出或是腰部受伤的人无法承受正常人一样的负重,否则会引起腰腿疼痛并可能对椎间盘造成更大的损伤,这给患者的生活工作带来了很大的不便。腰椎间盘突出症作为骨科的常见多发病越来越年轻化和职业化。为此,不少人都在研究能否采用辅助器件,以帮助患者减轻病痛,部分提高其负重能力。
现有的椎间盘护理主要以护腰带为主,如图1所示,护腰带的作用都是对肌肉施加一定压力,绷紧肌肉,短暂加强肌肉力量,达到调节运动受力平衡。同时能限制腰部关节的活动范围。护腰带上的钢板还可以分散一部分上身的重量,使椎间盘的压力得到一定的缓解。但是这种护腰的支撑力不大,无法明显降低椎间盘间的压力,且这种护腰带会压迫到腹部内脏,不宜长时间佩戴,否则会导致腰部肌肉萎缩。
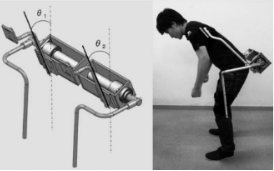
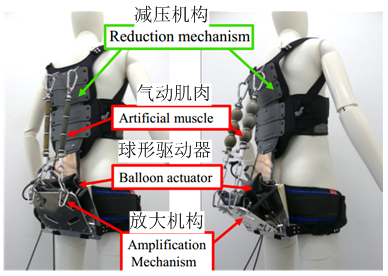
另外,椎间盘护理也采用以电机、气动人工肌肉作为驱动器的外骨骼式助力装置,如图2所示。对于腰椎间盘患者来说,外骨骼助力装置具有体积大、质量重、腰部左右活动范围受限以及柔顺性差等问题,并不适合患者的日常使用。
本团队利用设计的新型气动肌肉,设计了一种轻便、具备一定柔顺性的助力背心如图3所示,以帮助腰椎间盘突出患者恢复部分负重能力。

图1护腰带
(a) (b)
(c)
图2 外骨骼式助力装置
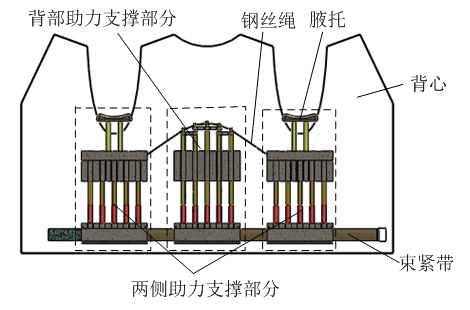
(a) 气动助力背心总体结构

(b) 气动助力背心实物图
图3 本团队研制的气动助力背心
二、气动助力背心的研究目标及难点
椎间盘护理装置要求能帮助腰伤患者恢复部分负重能力,且保证患者在日常生活活动。因此,设计的气动助力背心除了能够帮助腰椎间盘突出或腰痛患者减轻椎体压力并能使患者一定程度提高负重能力外,还应具有柔顺性、质量轻、穿戴方便、美观性、较大腰部活动性、充气方便等特点。
针对以上研究目标,本课题需要解决以下问题。
(1)如何设计一种新的柔性与适度刚性兼备并以轴向位移输出为主的气动肌肉。
(2)如何设计一种轻便柔顺的结构,使分布式气动肌肉在支撑点偏置的上体上实现有效助力支撑。
三、已进行的研究及成果
1、波纹内衬式滑管气动肌肉
研究设计了一种波纹内衬式滑管气动肌肉,能实现充气伸长负载的能力,并具有柔顺性和抗弯强度兼备、轻便小巧的特点。其示意图及实物如图4所示。
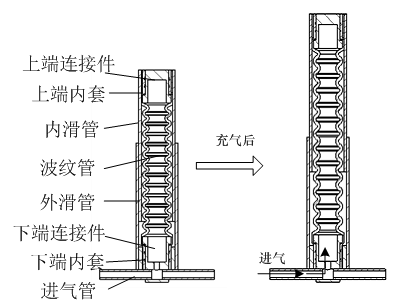

图 4波纹内衬式滑管气动肌肉
对该气动肌肉进行特性实验,得到了充气压力和伸长量与输出力的关系如图5所示。
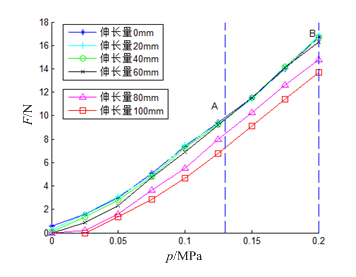
图 5波纹内衬式滑管气动肌肉特性
2、气动助力背心
以设计的波纹内衬式滑管气动肌肉为支撑单元,设计了能帮助腰椎间盘突出患者恢复部分负重的气动助力背心,能够实现研究目标。其实物如图3所示。
测试了气动助力背心的基本特性,在额定压力下最大能产生120N的支撑力其充气压力与总体支撑力间的关系如图6所示。通过对穿戴者的腰椎的活动范围进行测试如图7所示,结果表明穿戴气动助力背心对患者活动影响不大。
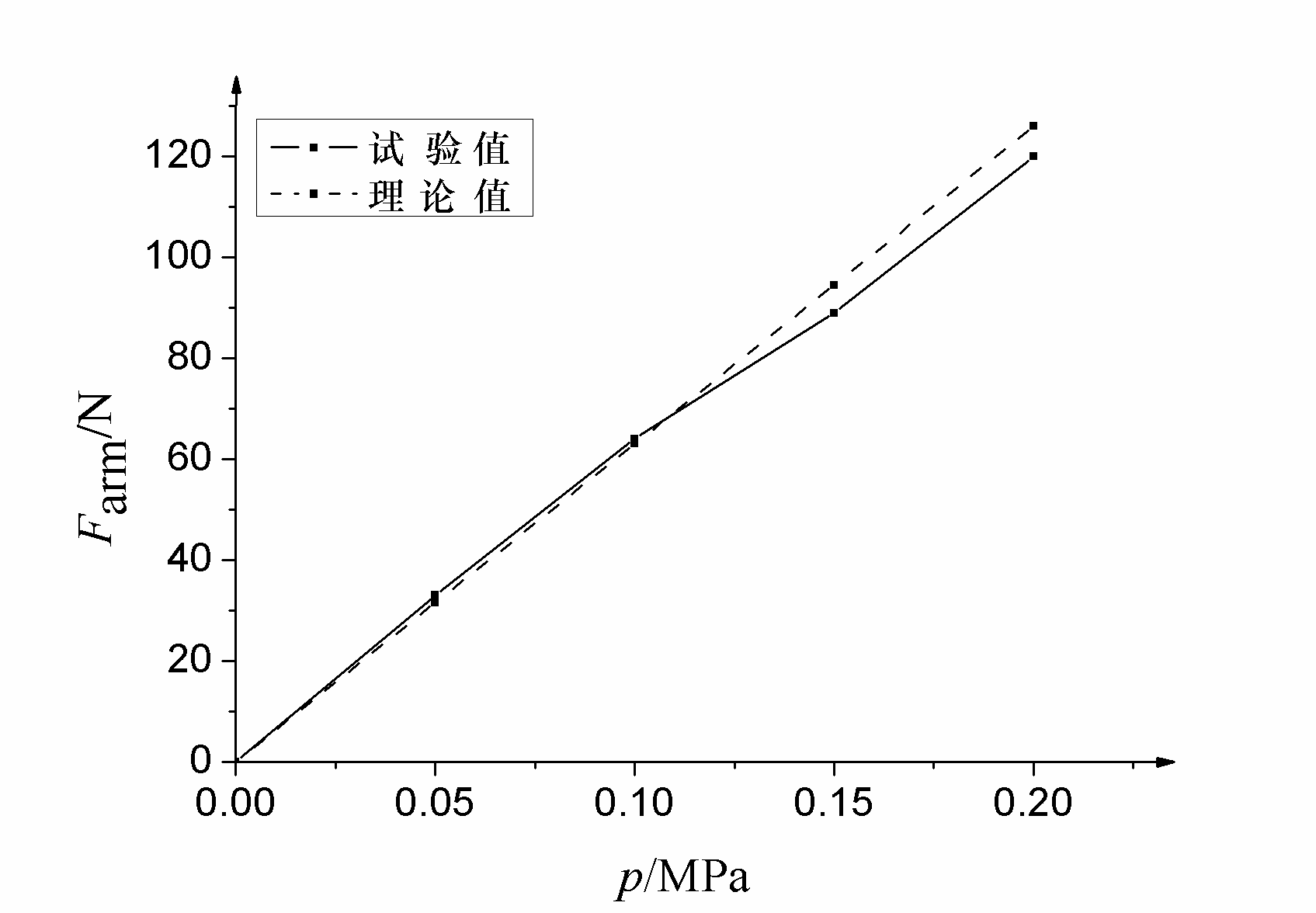
图 6 气动助力背心输出特性
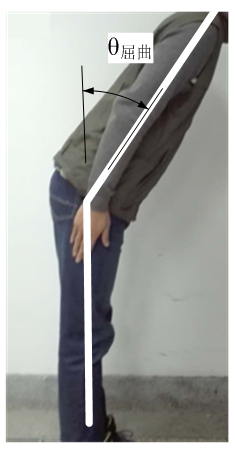


(a)屈曲 (b)侧屈 (c)旋转
图 7 腰椎活动范围测试示意图
四 团队在气动柔性驱动器设计和应用方面的研究
目前,我们团队除了气动肌肉助力背心的研究,在气动柔性驱动器的设计以及其在医疗康复和工业夹持器等方面的应用也做了一定的工作。
1、柔顺主被动膝关节康复器
设计的柔顺主-被动膝关节康复器如图8所示,采用无杆气缸+推力大行程气动柔性驱动器的复合驱动,利用无杆气缸能够实现较大行程范围内的驱动,同时易于控制其输出力的大小与方向实现被动与主动康复训练间的切换。而在屈膝训练过程的末端对患者关节组织进行拉伸训练的过程中采用推力大行程气动柔性驱动器的方式可保证该过程的柔顺性,以满足康复训练过程高安全性的要求。

图 8 柔顺性膝关节主被动康复器
2、可穿戴式手部助力康复手套
手指康复训练是手指康复的一种重要手段。传统康复器械大多采用电机驱动,结构为外骨骼形式,康复装置的体积重量都较大,不便于穿戴。利用气动柔性驱动器进行可穿戴式手部助力康复装置的设计如图9所示,使其具有安全、柔顺、体积小、重量轻的特点。
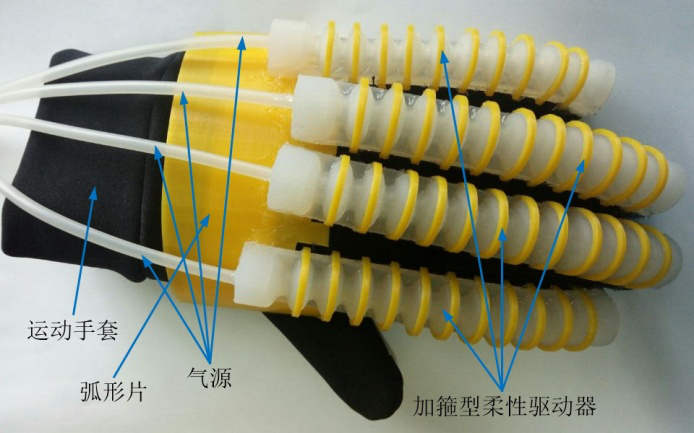
图 9可穿戴式手部助力康复手套
3、软体适形柔顺夹持器
针对混流生产物品搬送和柔顺夹持的需求,通过对软体生物变形机理的研究,提出软体适形柔顺夹持方法,以气压驱动的软体结构增大夹持装置与物体的接触面积来适应物体的形状,并集成负压发生设备和塑形材料于柔顺夹持装置中来大幅提高柔顺夹持装置的负载能力。软体适形柔顺夹持器如图10所示,可以进行物品夹持和搬送具有柔顺安全、维护方便等优点,并能适应多品种和规格的物品。

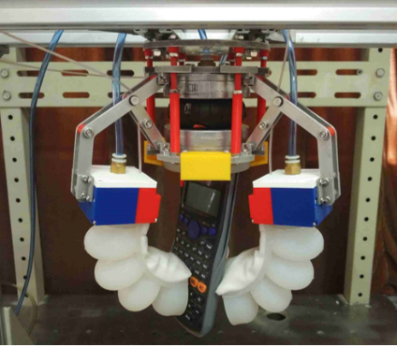
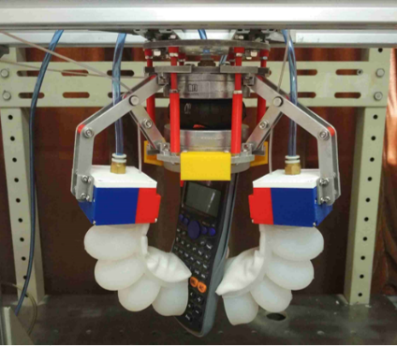
图 10软体适形柔顺夹持器
4 仿食道蠕动软驱动器
为提高吞咽困难医疗诊断水平,研究食品和吞咽系统相互影响关系和辅助开发安全食品,提出了仿生吞咽机器人,设计了气驱动仿食道蠕动软驱动器如图11所示,模仿人类吞咽过程中食道的蠕动运动。
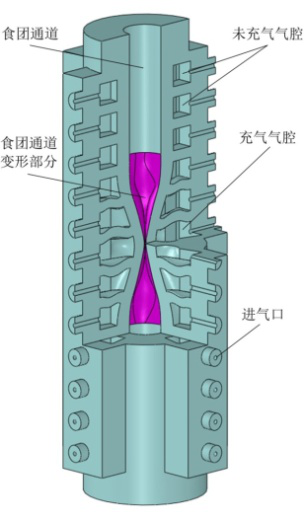

图11 仿食道蠕动软驱动器
五、未来研究方向。
目前,我们团队在气动柔性驱动器的设计以及其在医疗康复、工业夹持器等方面的应用进行了一定的研究,后续的研究方向包括但不仅限于:
(1)新型气动柔性驱动的设计与优化
(2)气动柔性驱动器在医疗康复中的应用
(3)气动柔性夹持器的应用与改进。


